
High Performance Embedded Prosthetics Controller
Project group
Computer Engineering Master's Program, in English
Lecture Number: L.079.09600
Term: WS 2014/15, SS 2015
Description
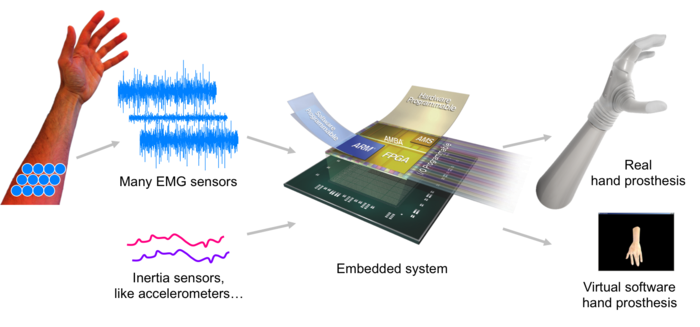
Worldwide there are more than 30 million people with amputation, and limb loss is expected to more than double by 2050. Prostheses have been developed throughout history to restore some of the hand’s original functionality and appearance. Modern electronic hand prostheses are controlled by measuring electromyographic (EMG) signals from the residual muscles in the amputation stump. These signals are generated in the muscle fibers during contractions and can be measured as low voltages on the surface of the skin.
Current commercially available prostheses typically use two electrodes within the socket to acquire EMG signals from two independent muscles. Amputees are able to control motors in the prosthesis by voluntarily contracting one of the two muscles to open and the other one to close the device. If another function like turning the prosthesis is desired, the amputee has to contract both muscles simultaneously to change the operation mode. Then, contracting one muscle turns the prosthesis clockwise and contracting the other muscle counter-clockwise.
This control scheme is considered awkward and nonintuitive by amputees and user acceptance for myoelectric hand prostheses is currently low. For this reason, the last decade has seen a remarkable increase in upper-limb prosthetics research. Promising control algorithms like classification and regression have been developed to predict a variety of different movements simultaneously from EMG signals. The majority of this work has been done under laboratory conditions on personal computers and has not been implemented in a commercial prosthesis. Embedded systems in current hand prostheses restrict the application of state of the art classification algorithms due to lack of resources like computational power and memory.

Goals of the project group
This project group will aim at developing a prosthesis controller for real-time classification of EMG signals on an FPGA platform. To this end, a library of components for signal filters, feature extractors and classifiers will need to be designed and implemented as digital circuits for FPGAs. These elements can then be assembled into a network of building blocks to implement state of the art control schemes. The controller will then need to be optimized in terms of classification speed, design size and power consumption.
The overall goal of the project group is to develop a prototype for a hand prosthesis controller capable of real-time classifying a huge amount of EMG data and driving a real hand prosthesis. In cooperation with the Bernstein Center for Computational Neuroscience (BCCN) Göttingen the project group will be provided with powerful EMG DAQs for acquisition of up to 500 channels of EMG data and state of the art hand prosthesis prototypes. It is planned to evaluate the performance with amputees and real prostheses in the BCCN.
What will you do?
In this project group, you will
- Implement algorithms in software, on ARM, DSP and FPGA
- Develop a HW/SW interface to state-of-the-art hand prostheses
- Earn expertise in biomedical signal processing
- Test your system on yourselves and with amputees
Prerequisites
- Interest in Biomedical (Computer-) Engineering
- Nice to have: low level programming skills (C, VHDL)
- You will learn everything you need to know
Schedule
The first meeting will take place in the third week of the semester. Further details will be announced shortly.
Further information
If you have any questions, feel free to get in touch with Alexander Boschmann.

